|
Surface Stereo Imager
Creates Panoramas that characterize the general environment of
the landing site. Featured in the Mars Lunar Lander Project. A part of
the MVCS (Mars Volatile and Climates Surveyor) |
|
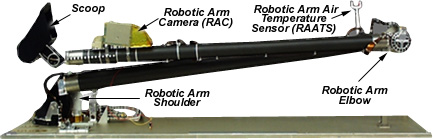
Robotic Arm and Camera
Composed of two parts: Robotic arm and camera. Robotic Arm digs trenches
and collects sample sample meterial for analysis. The camera obtains close-up
images of surfaces, walls and trenches.
|
|
Quadrupled Wall-climbing Robot (NINJA II)
Inspects and performs all operations on the exterior walls of high rise
buildings on high speed thoroughfares. Has four prismatic joint actuators
in parallel mechanism to achieve it's climbing feat. |

|
ATRV (tm) Mobile Robot
Has low centre of gravity for rough work in rough terrain. Has prospect
for use in Mars Expeditions. |

|
ATRV(tm) Micro robot
Small robot designed to work just like the above but is more flexible
and is able to do jobs where bigger equipment is not able to. |
|
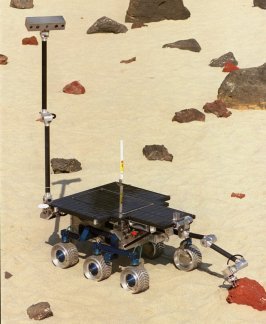
Next Generation Mars Rover
Used in the Mars Astronomy Project. For more information, see http://www.frc.ricmu.edu/projects/mars |
|
Advanced Life Support Automated Robotic Manipulator(ALSARM)
This robot has 3 degrees of freedom. Provides automated and manual data
acquisition in a closed bioregenerative life growth support chamber. |
|
Planetary Rover Robot
Programmed to navigate around outdoor environments. For more information,
see http://www.ai.mit.edu/people/matt/pebbles.html |
|
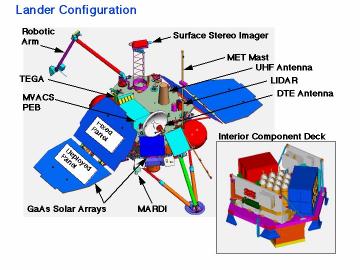
Mars Volatile & Climates Surveyor
Payload that includes Stereo Surface Imager, Robotic Arm with camera
(see above) and other environmental gauges and sensors. |
|
Serpentine Robot
Telerobotics inspection system to perform remote inspection in realistic
space-like environments. It's has applications in Space Stations. For more
info please visit http://robotics.jpl.nasa.gov/tasks/rsi/accomplishments/snake/snake.html |
|
Planetary Aerobot
These robots are mount on balloons to float up to several months in
atmospheres of planets. Equipped to conduct sophisticated observational
program from their unique vantage points. http://robotics.jpl.nasa.gov/tasks/aerobot/Background/intro.html |
|
Autonomous Helicopter Project
Develop vision-guided tobot helicopter which can automously carry out
the following goal mission in any weather conditions using only on-board
intelligence and computer power. |