Overview
|
Space robots performing delicate and complex tasks in unmanned facilities will
be indispensable in space activities of the year
2000. One of the key technologies for these robots is a hand with
dexterous and flexible capabilities. MITI developed a precise
telerobotic system with a three-finger multisensory hand, called the
"Advanced Robotic Hand System (ARH)", for the space robot
flight test on the ETS-VII (Engineering Test Satellite VII).
The ARH is the world's first precise extravehicular telerobotic system.
It works in the exposed environment of space on the
unmanned space vehicle without the help of a crew. The system has
durability in the severe space environment as well as skill and
autonomy.
The objectives of the space test of the ARH are
i) to demonstrate the potential of the multi-DOF multisensory hand for
precise in-orbit servicing
ii) to develop the technologies of a precise space telerobot
iii) to establish telerobotic technologies to execute high precision
tasks teleoperating from the ground
The project is promoted by the following organizations and industries.
MITI (Ministry of International Trade and Industry) :
Headquarters
ETL (Electrotechnical Laboratory) : Principal investigator
USEF (Institute for Unmanned Space Experiment Free Flyer) :
Project management
Fujitsu Ltd. : Main contractor of the robot system
Kawasaki Heavy Industries: Solar cell expansion experiment
Toshiba Corporation: Wire handling experiment
|
| Concepts
|
ETS-VII consists of a large chaser satellite weighing 2480kg and a small target
satellite of 380kg, and its main mission is to
acquire space robotics and rendezvous-docking technologies. The
satellites flies in a circular orbit at an altitude of 550km and
an inclination of 35deg. The precise telerobotic system including an
experimental robotic unit, a control computer and a power
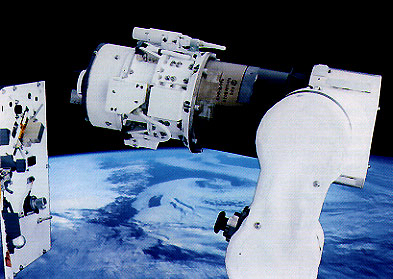
unit, was developed and installed into the chaser satellite. The
experimental robotic unit constituting a hand, an arm, a hand
exchange platform and a taskboard is located on the earth panel of the
satellite. The control computer and the power unit are on
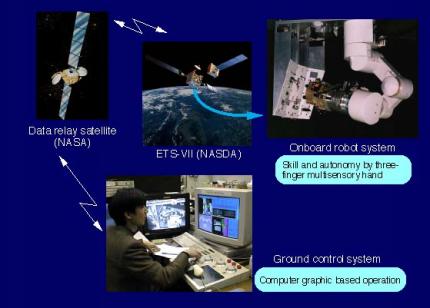
board inside the satellite. The telerobotic system is operated in three
modes: teleoperation from the ground, autonomous
operation, and mixed operation. Communication between the ground control
system and ETS-VII is linked via a data relay
satellite TDRS in geosynchronous orbit.
|
| Robot System
|
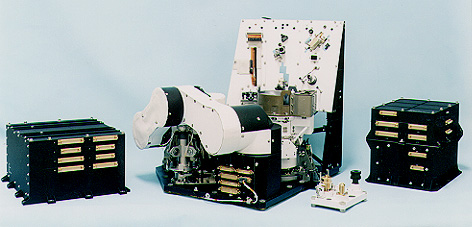
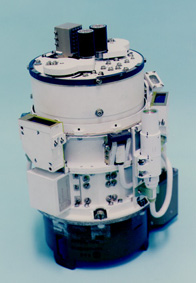
A compact robot system is designed to perform precise space
telerobotic experiments under the limitations of volume, mass and
power budget of ETS-VII. Volume of the experimental robotic unit in the
stowed configuration is 50x48x48 cm. Overall mass of
the onboard robot system is 45kg. The average power consumption of the
system is about 80W including the consumption of
29W by the power unit and control computer. The experimental robotic
unit including a mini-arm, a hand, a hand exchange
platform, a task board and latch mechanisms weighs 27kg. The hand is
separated from the arm and fixed to the stage by a latch
mechanism on the hand exchange platform during launching. The arm has a
tool to connect the hand.
|
| Hand
|
Skill and autonomy are important requirements for a precise space robot, and a
robotic hand is the key component to provide
them. The hand for space applications especially requires simple and
reliable mechanisms that have precise controllability
without increase of control computer load and grasping robustness. A
semidexterous three-finger hand was developed which
comprises three mechanisms, that is, a hybrid three-finger module, a
compliant finger tip and a wrist compliance device, for
providing the skill.
Local autonomy is another key factor. Sensor-based local autonomy will
overcome the difficulty of precise teleoperation from
the ground due to time delay and lack of communication capacity via a
data relay satellite. Furthermore, multisensors are also
required for measuring object/work environment to service space
equipment for which some conditions are uncertain. We
installed five kinds of sensors around the hand, namely, a hand-eye
camera, three proximity-range finders, a pair of grip force
sensors, a compliance sensor and a wrist force/torque sensor.
|
| Result
|
ETS-VII was launched on Nov. 28, 1997. Checkout of the Advanced Robotic Hand
System (ARH) was conducted
from March 22 to 26, 1998. The robot arm made work configuration
releasing the launch lock mechanisms and
connecting the hand. Then, the hand pushed the launch lock levers of
work cells and released the parts on the
taskboard. After that, performance tests of the multisensors installed
in the hand were carried out. All checkout
tasks were successfully conducted.
|